Frequency Domain Analysis of MIMO System Part 3. Singular Value Stability Margins
Good stability margins do not imply robustness, must look at distance to (-1,0)!
Motivation
Multi-variable Nyquist Theorem only determines absolute stability of a system, it does not indicate the degree of robustness for a MIMO system. To determine the degree of robustness, we determine how nearly singular the return difference is by computing its singular values versus frequency. Thus the stability robustness of a multi-variable system can be observed by minimum singular values of its return difference matrix, $I+L(s)$,at some frequency $s = jw_0$.
Singular Value
Singular values of a matrix are non-negative real numbers. The maximum singular value of a matrix represents how “big” the matrix is or how large the “gain” of the matrix is. The minimum singular value represents how nearly singular the matrix is.
properties:
\[\begin{aligned} &\overline{\sigma}(A) = \max_{x\neq0}\frac{||Ax||_2}{||x||_2} = ||A||_2\\ &\underline{\sigma}(A) = \min_{x\neq0}\frac{||Ax||_2}{||x||_2}\\ \\ &\overline{\sigma}(A^{-1}) = \frac{1}{\underline{\sigma}(A)} \text{ and } \underline{\sigma}(A^{-1}) = \frac{1}{\overline{\sigma}(A)} \\ \\ &\text{If matrices U and V are unitary:} \\ &\sigma_i(A) = \sigma_i(UA) = \sigma_i(AV) \\ \end{aligned}\]$A+B$ Argument
The minimum singular value $\underline{\sigma}(A)$ measures the near singularity of the matrix $A$. Assume that the matrix $A+B$ is singular, we have
\[\underline{\sigma}(A) \leq ||Ax||_2 = ||Bx||_2 \leq ||B||_2 =\overline{\sigma}(B)\]Proof:
| If $A+B$ is singular, then $A+B$ is rank deficient and $A+B$ must have null space. Thus there exists a vector $x \neq \vec{0}$ with unit magnitude ($ | x | _2 = 1$) such that |
Thus
\[Ax=-Bx \quad\Rightarrow\quad ||Ax||_2 = ||Bx||_2\]With properties of singular values, the $A+B$ argument is proved.
Uncertainty Model
| Additive Uncertainty Model | Multiplicative Uncertainty Model | |
|---|---|---|
| Uncertainty Model | \(\Delta = \begin{bmatrix} k_1e^{j\phi_1}& & \\ & \ddots & \\ & & k_ie^{j\phi_i}\end{bmatrix}\) | \(\Delta_u = \begin{bmatrix} k_1e^{j\phi_1}-1& & \\ & \ddots & \\ & & k_ie^{j\phi_i}-1\end{bmatrix}\) |
| Block Diagram | 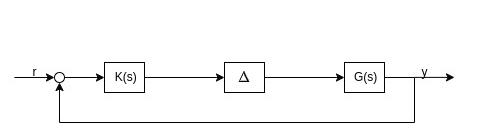 | 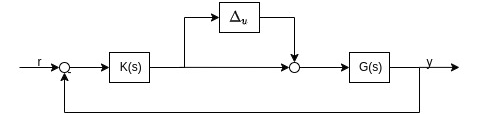 |
| Loop Transfer Function | \(L_u = K G \Delta\) | \(L_u = K G (I_u + \Delta_u)\) |
| Return Difference | \(I_u + L_u = I_u + K G \Delta\) | \(I_u + L_u = I_u + K G (I_u + \Delta_u)\) |
Gain and Phase Margins For Multivariable Systems at Plant Input
We want to find the smallest uncertainty $\Delta$ that destabilizes the nominal system.
The return difference matrix of Additive Uncertainty Model could be expressed as:
\[\begin{aligned} I_u + KG\Delta &= I_u + L_u\Delta \\ &=[(\Delta^{-1}-I_u)(I_u+L_u)^{-1}+I_u](I_u+L_u)\Delta \end{aligned}\]Assume controller $K(s)$ stabilizes the nominal plant, and since $\Delta$ is diagonal we have
\[\underbrace{I_u + KG\Delta}_{\text{Singular}} =\underbrace{[(\Delta^{-1}-I_u)(I_u+L_u)^{-1}+I_u]}_{\text{This matrix must be singular}}\underbrace{(I_u+L_u)\Delta}_{\text{Nonsingular}}\]Using $A+B$ argument:
\[\underbrace{(\Delta^{-1}-I_u)(I_u+L_u)^{-1}}_B+\underbrace{I_u}_A\]To be nonsingular:
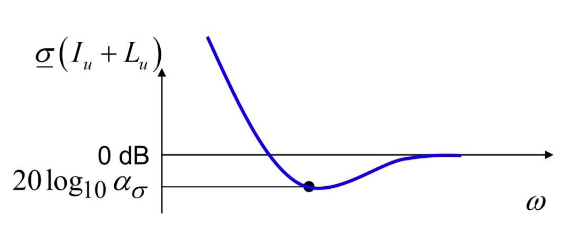
\[\begin{aligned} \underline{\sigma}(A) &> \overline{\sigma}(B)\\ \underline{\sigma}(I_u) &> \overline{\sigma}((\Delta^{-1}-I_u)(I_u+L_u)^{-1})\\ 1 &> \overline{\sigma}((\Delta^{-1}-I_u)(I_u+L_u)^{-1})\\ 1 & \geq \underbrace{\overline{\sigma}(\Delta^{-1}-I_u) \overline{\sigma}((I_u+L_u)^{-1})}_{\text{note that we lose structure here}}\\ \frac{1}{ \overline{\sigma}((I_u+L_u)^{-1})} &\geq \overline{\sigma}(\Delta^{-1}-I_u) \\ \underline{\sigma}(I_u+L_u) &\geq \overline{\sigma}(\Delta^{-1}-I_u) \end{aligned}\]Let $\alpha_{\sigma} = \displaystyle\min_{w}{ \underline{\sigma}(I_u+L_u(jw))}$,we have
\[\alpha_{\sigma} \geq \overline{\sigma}(\Delta^{-1}-I_u)\\ \sigma_i(\Delta^{-1}-I_u) = |\frac{1}{k_ie^{j\phi_i}}-1|\]Therefore, stability margin could be computed by:
Gain Margin(zero phase uncertainty $\phi_i = 0^\circ$):
\[\alpha_{\sigma} \geq \overline{\sigma}(\Delta^{-1}-I_u) = |\frac{1}{k_ie^{j\phi_i}}-1|= |\frac{1}{k_i}-1|\\\\ \quad\quad\quad\quad\quad\quad\Downarrow \\\\ \begin{aligned} 1-\alpha_{\sigma} \leq &&\frac{1}{k_i} &&&\leq 1+\alpha_{\sigma}\\ \frac{1}{1+\alpha_{\sigma}} \leq&& k_i &&&\leq \frac{1}{1-\alpha_{\sigma}} \end{aligned}\]Phase Margin(zero gain uncertainty $k_i = 0$)
\[\begin{aligned} \alpha_{\sigma} \geq \overline{\sigma}(\Delta^{-1}-I_u) & = &&|\frac{1}{k_ie^{j\phi_i}}-1| = |e^{-j\phi_i}-1| = |cos(\phi_i)-1-jsin(\phi_i)|\\ & = &&\sqrt{(cos(\phi_i)-1)^2+sin^2(\phi_i)}\\ & = &&\sqrt{2-2cos(\phi_i))}\\ & = &&\sqrt{4sin^2(\frac{\phi_i}{2})}\\ & = &&\pm2sin(\frac{\phi_i}{2})\\ &\Downarrow \\\\ \phi = \pm2sin^{-1}(\frac{\alpha_{\sigma}}{2}) \end{aligned}\]Likewise, the return difference matrix of Multiplicative Uncertainty Model could be expressed as:
\[\begin{aligned} I_u + KG(I_u + \Delta_u) &= I_u + L_u(I_u + \Delta_u) = I_u + L_u + L_u\Delta_u \\ &=L_u(L_u^{-1}+I_u+\Delta_u) \end{aligned}\]Assume controller $K(s)$ stabilizes the nominal plant, we have
\[\underbrace{I_u + KG(I_u + \Delta_u)}_{\text{Singular}} =\underbrace{L_u}_{\text{Nonsingular}}\underbrace{(L_u^{-1}+I_u+\Delta_u)}_{\text{Must be singular}}\]Using $A+B$ argument:
\[\underbrace{(L_u^{-1}+I_u)}_A + \underbrace{\Delta_u}_B\]To be nonsingular:
\[\begin{aligned} \underline{\sigma}(A) &> \overline{\sigma}(B)\\ \underline{\sigma}(L_u^{-1}+I_u) &> \overline{\sigma}(\Delta_u)\\ \underline{\sigma}(L_u^{-1}+I_u) &> \overline{\sigma}(\Delta - I_u)\\ \end{aligned}\]Let $\beta_{\sigma} = \displaystyle\min_{w}{ \underline{\sigma}(I_u+L_u^{-1}(jw))}$, we have
Therefore, stability margin could be computed by:
Gain Margin(zero phase uncertainty $\phi_i = 0^\circ$ ):
\[\beta_{\sigma} \geq \overline{\sigma}(\Delta-I_u) = |k_ie^{j\phi_i}-1|= |k_i-1|\\\\ \quad\quad\quad\quad\quad\quad\Downarrow \\\\ \begin{aligned} 1-\beta{\sigma} \leq &&k_i &&&\leq 1+\beta_{\sigma} \end{aligned}\]Phase Margin(zero gain uncertainty $k_i = 0$):
\[\begin{aligned} \beta_{\sigma} \geq \overline{\sigma}(\Delta-I_u) & = && |k_ie^{j\phi_i}-1| = |e^{j\phi_i}-1| = |cos(\phi_i)-1+jsin(\phi_i)|\\ & = &&\sqrt{(cos(\phi_i)-1)^2+sin^2(\phi_i)}\\ & = && \sqrt{2-2cos(\phi_i))}\\ & = &&\sqrt{4sin^2(\frac{\phi_i}{2})}\\ & = &&\pm2sin(\frac{\phi_i}{2})\\ &\Downarrow \\\\ \phi = \pm2sin^{-1}(\frac{\beta_{\sigma}}{2}) \end{aligned}\]Summary of Singular Value Margins:
- Also called multivariable stability margins
- Both sufficient test for stability
- Always more conservative than SISO classical margins
| Additive Uncertainty Model $I+L$ | Multiplicative Uncertainty Model $I+L^{-1}$ | |
|---|---|---|
| Gain Margin $GM$ | \([\frac{1}{1+\alpha_{\sigma}} \quad \frac{1}{1-\alpha_{\sigma}}]\) | \([1-\beta_{\sigma} \quad1+\beta_{\sigma}]\) |
| Phase Margin $PM$ | \(\pm2sin^{-1}(\frac{\alpha_{\sigma}}{2})\) | \(\pm2sin^{-1}(\frac{\beta_{\sigma}}{2})\) |
| Best Gain Margin | \([-6 \quad +\infty] \text{ dB}\) | \([-\infty \quad +6] \text{ dB}\) |
| Best Phase Margin | \(\pm60^\circ\) | \(\pm60^\circ\) |
| Singular Value Margins | \(\begin{aligned}GM_{SV} = GM_{I+L} \cup GM_{I+L^{-1}}\\PM_{SV} = PM_{I+L} \cup PM_{I+L^{-1}}\end{aligned}\) | \(\begin{aligned}GM_{SV} = GM_{I+L} \cup GM_{I+L^{-1}}\\PM_{SV} = PM_{I+L} \cup PM_{I+L^{-1}}\end{aligned}\) |
The Control Design Dilemma:
The best gain and phase margin is achieved when \(\alpha_{\sigma} = \beta_{\sigma}=1\), as a control engineer, we would like make $\alpha_{\sigma} = \beta_{\sigma}=1$ large at the same time
| Return Difference Matrix $I+L=S^{-1}$ | Stability Robustness Matrix $I+L^{-1} = T^{-1}$ |
|---|---|
| Inverse of Sensitivity | Inverse of Complementary Sensitivity |
| \(\min_{\omega}\underline{\sigma}(I+L_u)=\alpha_{\sigma} = \frac{1}{\lVert S_u \rVert _{\infty}}\) | \(\min_{\omega}\underline{\sigma}(I+L_u^{-1})=\beta_{\sigma} = \frac{1}{\lVert T_u \rVert _{\infty}}\) |
| 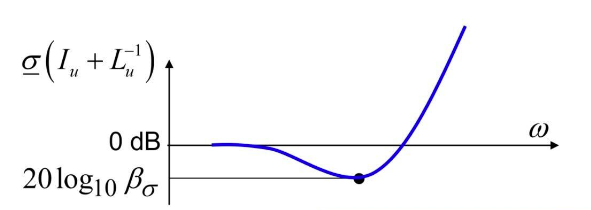 |
| Small minimum singular value indicates poor stability robustness | Small minimum singular value indicates large peak resonance |
| Make $S$ small at low frequencies for command following | Make $T$ small at high frequencies for robustness to unmodeled dynamics and sensor noise |
| Equality Constraint | $S+T = I$ |
| Fundamental Trade-off | Must trade-off when neither are small at loop gain crossover frequency |